从NVIDIA的Neuralangelo这篇工作入手,梳理神经表面重建(NSR)的一些知识。
参考论文:
- nerf
- nerf++ / mipnerf360
- neus
- neuralangelo
体渲染
连续的体渲染公式
光线r=o+tv穿过的像素颜色:
采样点权重:
透过率:
不透明度:
离散化的体渲染公式
光线r=o+tv穿过的像素颜色:
$$
C(o,v)=\sum^{N}{i=1}\omega_ic_i=\sum^{N}{i=1}T_i\alpha_ic_i
$$
采样点权重:
透过率:
不透明度:
间隔长度:
基于体密度(density)的体渲染
用于背景部分的渲染。
体密度sigma(t)如何理解:光在t位置处碰撞到微小粒子的概率。
透过率T(t)如何理解:光从光源传播到t位置处的整个过程不与微小粒子发生碰撞的概率。
采样:分层采样,将光线平均划分成N个区间,每个区间随机采样一个点。
1
def volume_rendering_alphas_dist(densities, dists, dist_far=None):
基于有向距离函数场(SDF)的体渲染
用于前景部分的渲染.
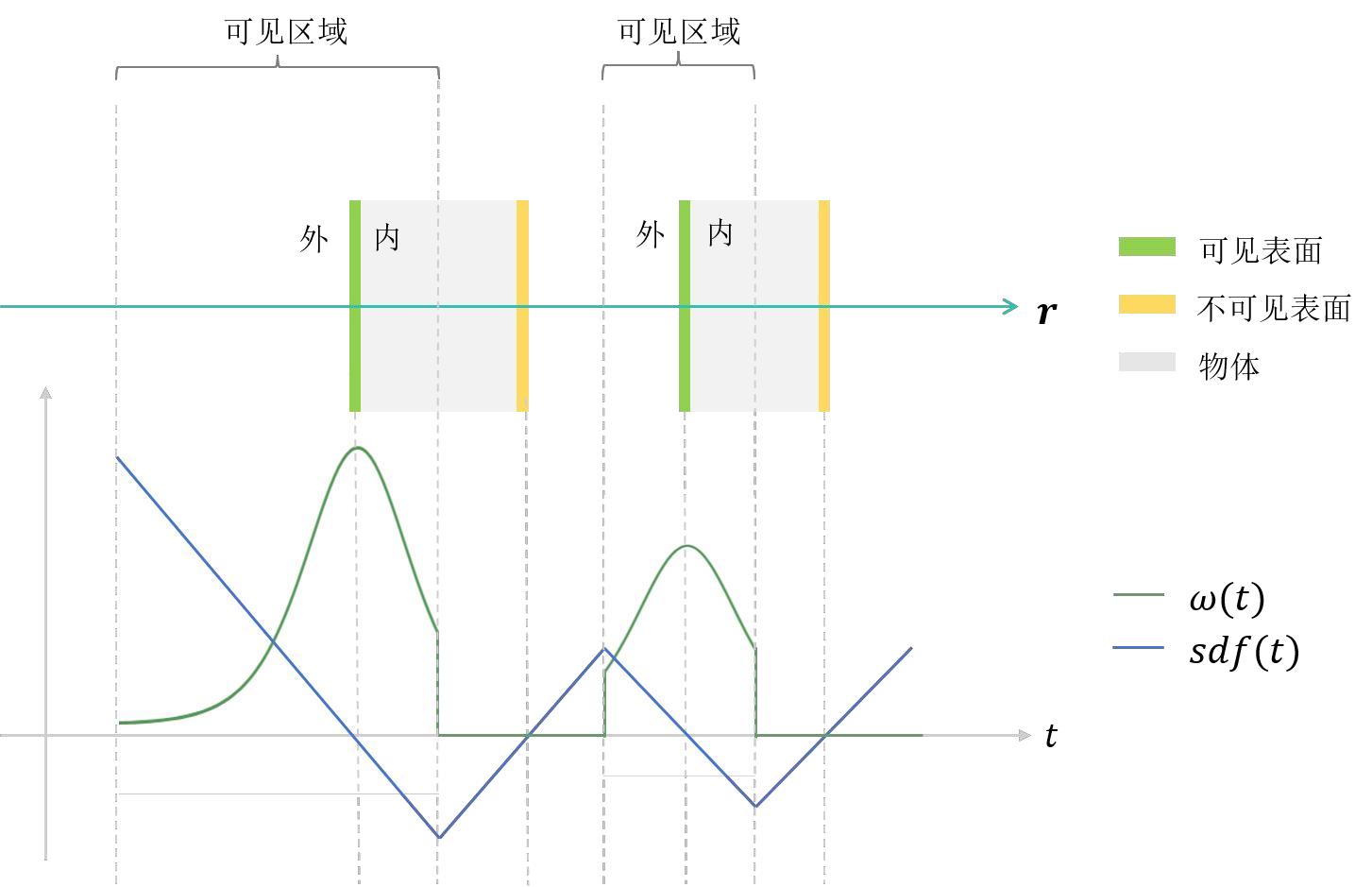
与体密度场不同,SDF场的目的是提取物体表面,需要 保证光线与物体表面相交的点对于像素颜色的贡献最大 。
据SDF的定义,SDF>0表示点在表面之外,SDF=0表示点在表面上,SDF<0表示点在表面之内。提取表面就需要找到SDF=0的点,那能否定义一个函数,当这个函数取得极大值时,代表此时对应的点在表面上呢?于是定义:
- phi(x)是sigmoid函数的导数,形状呈钟形,当x=0时取得最大值,标准差为1/s.
- 如果把SDF(P(t))作为自变量x代入phi(x),当SDF(P(t*))=0即 P(t*)是光线和表面的交点时,phi(x)取得最大值,这保证了光线与物体表面相交的点对于像素颜色的贡献最大。因此可以将phi(x)作为采样点是否是线面交点的概率密度函数。
如何计算采样点的权重:
考虑无偏性,采用归一化概率密度分布的方式求出采样点的权重:
上述权重公式没有顾及光线穿过不同表面的先后次序,实际上如果不同表面之间存在遮挡情况,只有先到达的表面是“可见”的,被遮挡的表面应当是“不可见的”,如果不加以限制,可能会造成颜色的混叠,与真实情况不符。所以如果存在多个SDF值为0的采样点,给予靠近相机光心的采样点更多的权重(t越小,w越大)。
首先考虑SDF的计算方法:光线和表面相交于点P(t*),表面在该处向外的法向量为n,光线方向向量为v,则光线上某一点P(t)到表面的最短距离,即SDF为:
将其代入权重公式,得到:
又有:
则有:
又
对形如
这种积分求导的方法:
因此:
所以:
因此:
故:
体渲染具体实现
整体流程:
1 | def render_pixels(self, pose, intr, image_size, stratified=False, sample_idx=None, ray_idx=None): |
将采样光线与前景单位球(r=1)求交,得到在前景的
near和far平面之间的采样点以及在背景部分的采样点。1
def get_dist_bounds(self, center, ray_unit):
分别对前景和背景进行渲染。从前景MLP和背景MLP中取出每个采样点的(1)色彩
rgbs、(2)SDF或者是体密度sigma的值,进一步计算(3)透明度alphas,从采样阶段取出(4)采样间隔dists。将前景和背景采样点的这些属性拼接在一起,利用渲染公式合成每条采样光线的渲染结果。
对物体表面的渲染
1 | def render_rays_object(self, center, ray_unit, near, far, outside, app, stratified=False): |
在由起点
center和方向ray_unit定义的光线上采样一系列点,获取这些点的t值(深度/距离)。1
2def sample_dists_all(center, ray_unit, near, far, stratified=stratified)
def sample_dists_hierarchical由p=
center+tray_unit,计算每个采样点在空间中的XYZ坐标。前传获得SDF、特征向量。
1
sdfs, feats = self.neural_sdf.forward(points)
计算sdf的一阶导数和二阶导数
1
def neural_sdf.compute_gradients(points, training=self.training, sdf=sdfs)
计算表面normal:也就是sdf归一化的一阶导数。
利用点坐标、光线方向、法向量、sdf场特征向量,前传获得RGB。
基于SDF计算不透明度。
计算光线
ray_unit和表面法向量normal的夹角余弦true_cos.注意这个夹角余弦和下面这个公式斜率的联系:
下面计算sdf(t)
1
2def compute_neus_alphas(ray_unit, sdfs, gradients, dists, dist_far=far[..., None],
progress=self.progress)输出结果。
对背景的渲染
1 | def render_rays_background(self, center, ray_unit, far, app_outside, stratified=False): |
在由起点
center和方向ray_unit定义的光线上采样一系列点,获取这些点的t值(深度/距离)。1
def sample_dists_background(ray_unit, far, stratified=stratified)
对背景光线的采样原理:
一条光线与前景球体求交,可能有两个交点,按照距离view point的远近分为
t_near和t_far。那么光线在前景的采样范围为【
t_near,t_far】那么光线在背景的采样范围为【
t_far,+∞】可以看出,背景的采样范围是无穷的,但是采样只能采有限个点。因此为了采样方便,需要将背景的采样范围限制在有限空间内。做法是将距离求倒数,使得
t_far=1,无穷远处为0。具体实现是在运用下面的采样函数时,设置dist_range =(1,0)而不是(0,1)。
1
def sample_dists(ray_size, dist_range, intvs, stratified, device="cuda")
- 上述映射只是为了方便采样,在采样之后需要还原采样点在光线上的t值:
由p=
center+tray_unit,计算每个采样点在空间中的XYZ坐标。1
def get_3D_points_from_dist(center, ray_unit, dists)
将这些采样点的空间坐标输入背景MLP中,通过前向传播,得到对应位置的
rgb、体密度,然后计算不透明度。输出结果。1
2
3
4
5
6background_nerf.forward(points, rays_unit, app_outside)
output = dict(
rgbs=rgbs, # [B,R,3]
dists=dists, # [B,R,N,1]
alphas=alphas, # [B,R,N]
)
采样
无边界场景
在户外(outdoor)用相机多角度拍摄一个中心物体,其周围的背景也会被拍摄下来,而户外背景在没有遮挡的情况下可以延伸到无限远,这就导致动态深度范围很大。然而渲染只能用有限的点去做一个近似积分,因此必须把无边界场景映射到有界的空间范围内。如果相机朝向不是任意的。比如只是拍摄了前向场景(forward scene), 此时相机平面和物方平面明显分隔于两侧,此时可以将相机的视锥体通过投影映射到NDC空间。如果相机的指向是任意的。此时相机平面和物方平面在空间中的分布就不规律了,上面的方法就不适用。此时有两种路线:
- NeRF++ : 把整个场景分成两部分:前景和背景。用一个半径为1的单位球框住前景,其余部分为背景。相当于有两个体素网格,球内一个、球外一个,然后分别独立地用一个MLP去估计体密度和颜色。球内的光线采样是有界的,而球外不是,因此需要对球外的部分使用反向球面参数化。
目的是把球外坐标映射到球面上,做如下变换:
其中
给定1/r, 根据几何关系求出球外坐标映射到球面上的坐标(x’,y’,z’):
求出光线和球体的交点a
作球心关于光线的垂线,垂足为b
也就是说a和b都能通过上面方法求出,相当于已知数。接下来
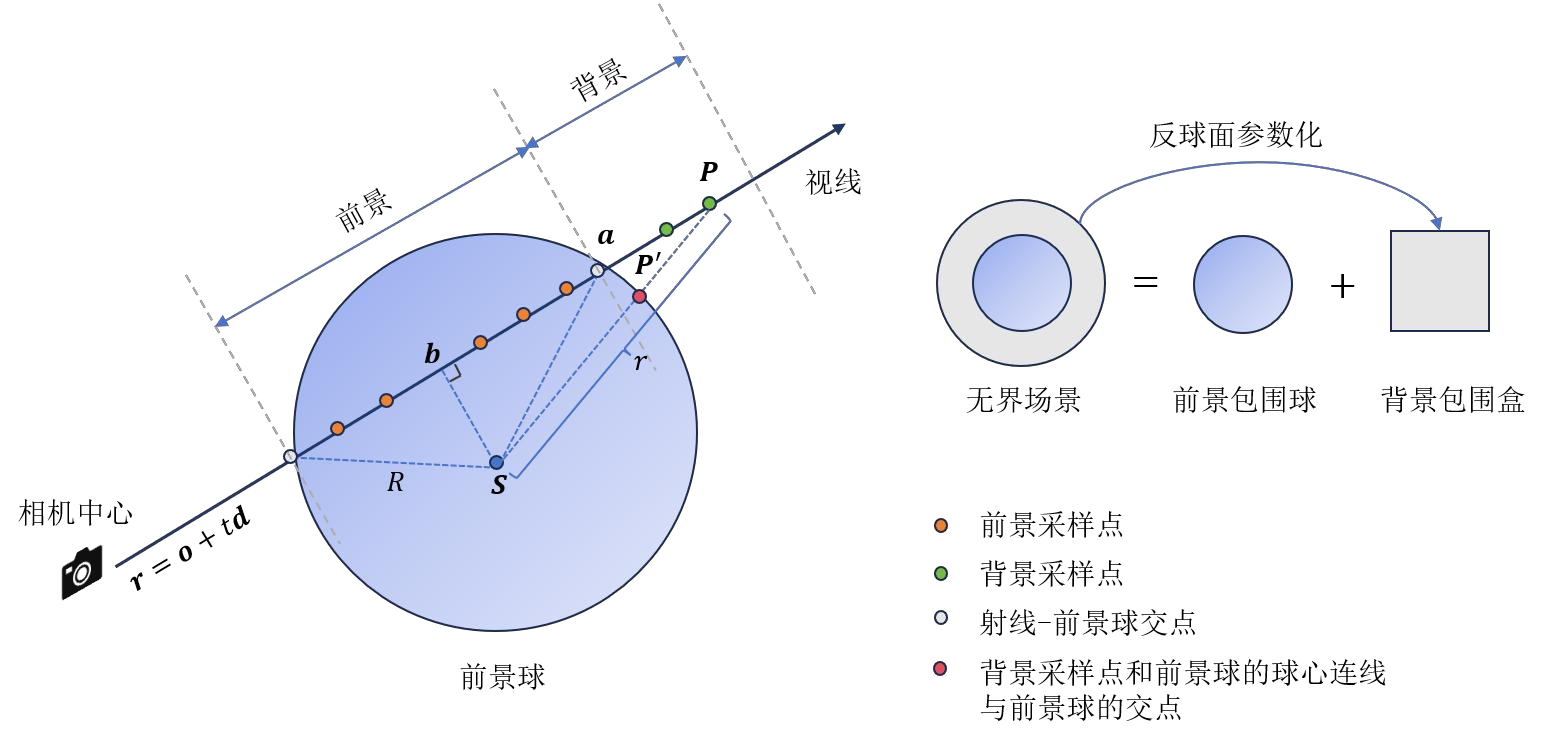
2. Mip-NeRF360 : 用一个MLP同时估计前景和背景。
采样距离
视差:空间点在左右影像中的同名像点在像素坐标系的x坐标之差。
深度:在相机坐标系中空间点的Z坐标。
逆深度:深度的倒数。
采样的“距离”可以是深度,也可以是视差。对于无边界场景,希望在近处的物体多被采样,在远处的物体少被采样。此时对深度进行采样不能达到这个目的,此时应当对视差(逆深度)进行等距采样。
视差和深度之间的关系:
采样方法
均匀采样(Uniform sampling): 等间距地选取采样点。最后使用线性拉伸将所有采样点的坐标限制在[near,far]之内。
分层抽样(Stratified Sampling):将总体按某种特征或规则划分为不同的层(Strata), 然后从每一层中随机抽取一定量的抽样单位,组成样本。具体的代码实现是:
首先将整条采样光线(从near到far之间)平均分成N段,记下每段的端点的坐标(也就是r=o+td中的t值):比如0,1,2,…
然后生成N个在0-1之间符合均匀分布的随机数,代表在每一段中采样点的位置。比如0.32,0.45,0.13,…
然后将二者相加,得到采样点在光线上的位置t:0.32,1.45,2.13,…
最后使用线性拉伸将所有采样点的坐标限制在[near,far]之内。
1
2def sample_dists(ray_size, dist_range, intvs, stratified, device="cuda"):
# uniform or stratified sampling层次化采样(Hierarchical sampling):
(1)首先均匀采样一批coarse-points.
(2)然后进行n次迭代,每次迭代在上一次采样基础上,增加一批fine-points.
fine-points的选取, 可以利用coarse-points的pdf来指导,也可以设定一个值。
1
2
3def sample_dists_all
def sample_dists_hierarchical
def sample_dists_from_pdf(bin, weights, intvs_fine):
与原始的NeRF同时优化粗、细两个网络不同,朗基罗遵循了NeuS的思路,只优化一个网络。具体的做法是,首先均匀采样粗采样点,然后在此基础上迭代采样精采样点,将所有采样点一起放入一个网络中。重点在于,需要根据coarse-points的SDF值来确定fine-points。粗采样点的概率weight基于具有固定标准差s-var的s密度φs(f(x))计算的。细采样点的概率是基于一个可学习的标准差s-var的密度φs(f(x))计算的。
Neuralangelo: 多尺度从粗到细的神经表面优化
哈希网格的分辨率
为什么不从一开始就激活所有分辨率网格:
如果一开始就激活了所有网格,那么精细的网格容易在一开始,也就是在计算SDF梯度时用到的步长比较大的时候,学到一些冗余的甚至错误的几何信息,如果后续不收敛,几何细节就难以恢复。因此,一开始只激活较粗的分辨率网格,随着迭代次数
iter的增多,逐步激活更细的分辨率网格。active_levels的更新过程是三段式的,具体而言是:stage 1: 计算退火层数
anneal_levels。有以下几点限制:- 使用
max[(iter - warm_up_end) // step, 1]计算。 - 不能大于最大激活层数,不能小于初始激活层数,否则就截断为最大值或者最小值。
- 使用
stage 2: 此后每迭代
step次就多激活一层,直到达到最大层数。stage 3: 保持最大激活层数直到训练结束。
如何实现特定分辨率哈希网格的激活(work):
新建一个mask,使它的形状和哈希编码后的坐标相同。将需要激活的层对应mask上的位置赋值为1,反之则赋值为0。然后将mask和哈希编码后的坐标相乘,这样就使得激活层的编码原封不动进入后续环节,而非激活层的编码特征变为0而无法发挥作用。
1 | def set_active_levels(self, current_iter=None) |
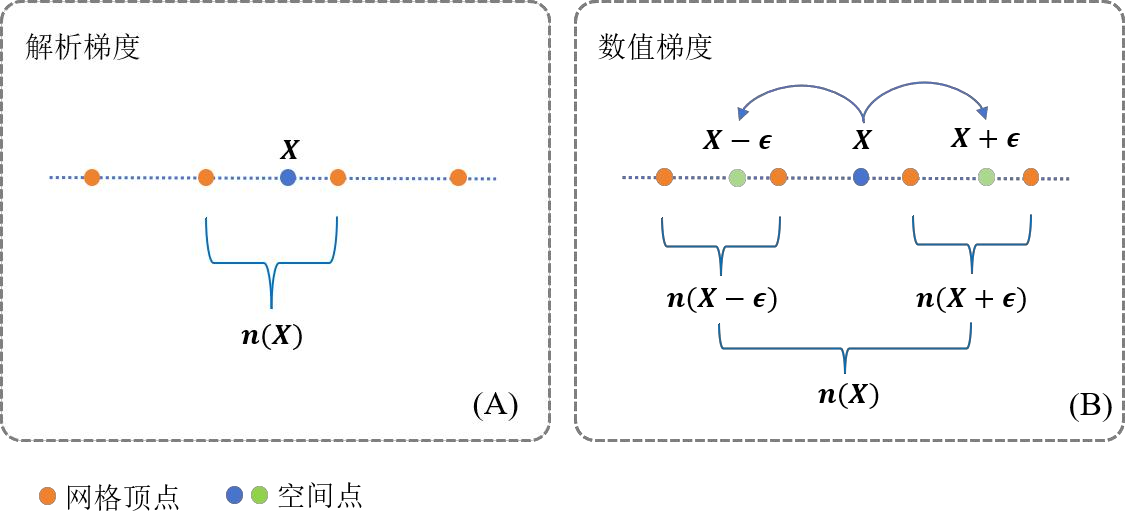
数值梯度
- 数值梯度的计算 :数值梯度是解析梯度的近似,数值梯度的极限就是解析梯度,因此解析梯度的准确性更高。数值梯度虽然不够精确,但是可以通过控制步长,达到不同程度的平滑效果。一阶数值梯度(一阶差商)的计算方法为:
实际在计算数值梯度时要从XYZ三个轴分别采样2个点,总计对邻域空间内的6个点进行采样。
数值梯度步长的变化 : 使用数值梯度来计算SDF的一阶和二阶导数,好处就是可以通过更改数值梯度的步长,来控制表面的平滑程度:小步长能够保留更多细节,大步长能让表面更加连续平滑。遵循“coarse to fine”的策略,计算SDF梯度时用到的步长
eps是随着迭代次数iter的增多而逐渐变小的,它的更新过程:计算退火层数
anneal_levels。使用max[(iter - w) // step, 1]计算。一般设置
w = step。此时退火层数anneal_levels的是一个关于迭代次数的分段函数,在[0-3w]为1,在[3w-4w]为2,在[4w-5w]为3,… .直到迭代到最大层数。在每一次迭代过程中,从resolution的list序列中取出层数为
anneal_levels的网格分辨率。eps = 1/resolution[anneal_levels].
1
2def set_normal_epsilon(self)
def compute_gradients(self, x, training=False, sdf=None)
正则项的权重
- 迭代就是要使得loss函数值越来越小,loss包含三项:一是色彩渲染的损失、二是对SDF梯度的物理意义的限制、三是对SDF二阶导也就是物体表面的平均曲率的限制。
- 前两点在整个从粗到细的优化过程中的重要性都保持不变,但是平均曲率限制的强度必须和计算SDF数值梯度的步长变化步调一致。所谓步调一致就是在相同时间在数值上变化相同的倍数。这样才能保证在粗网格中施加权重较大的曲率正则,能先学习到表面整体的几何形状;在细网络中施加权重较小的曲率正则,能够学习到表面的局部细节。
构建隐式辐射场
- 隐式辐射场存储在网格或者是MLP中,并且在空间中连续可微。通过训练得到网格或者是神经网络中的一系列参数,这些参数就共同定义了这个辐射场。向辐射场中输入任一采样点的位置(p=o+td),就能够查询到该点具有的SDF、RGB属性。渲染时要查询所有采样点的相关属性,在合成像素最终的色彩时综合考虑光线上所有采样点的贡献。
建立物体的SDF和RGB field
- SDF: 用多尺度哈希编码将采样点的空间坐标升维成特征向量,然后输入MLP。通过迭代不断更新哈希网格和MLP的参数使loss尽可能小。计算loss时使用数值梯度的方法计算SDF的一阶差商和二阶差商,SDF的值就从这个连续场取。训练后得到一个隐式存储在MLP和哈希网格中的关于坐标XYZ的SDF连续场。
- RGB: 输入主要包含:未编码的空间坐标point_3D
dim=3;用球谐函数编码后的视角view;表面向量normaldim=3;SDF网络输出的特征向量feats。训练后得到一个隐式存储在MLP中的RGB连续场。
1 | class NeuralSDF(torch.nn.Module): |
建立背景的density和RGB field
- 如果是基于NeRF++的前景、背景分离的方法,需要输入一个4维的反向球面参数化坐标、一个3维的视角方向向量。当然还要对坐标傅里叶编码、对视角球谐编码。训练后得到背景的体密度场和色彩场。
1 | class BackgroundNeRF(torch.nn.Module) |